
■お知らせ:AIDBの感想を募集しています!
トマト収穫ロボットの「視覚」を開発!農業の自動化が前進(AI×農業)【論文】
果物を自動収穫できるロボットの”目”を作るには?
IT、ドローン、ロボットなどのテクノロジーを用いた新しい農業であるアグリテックは、世界中でますます注目を集めている分野だ。特に果物収穫ロボットは、その潜在的な効率の高さゆえ、急速に開発が進められている。
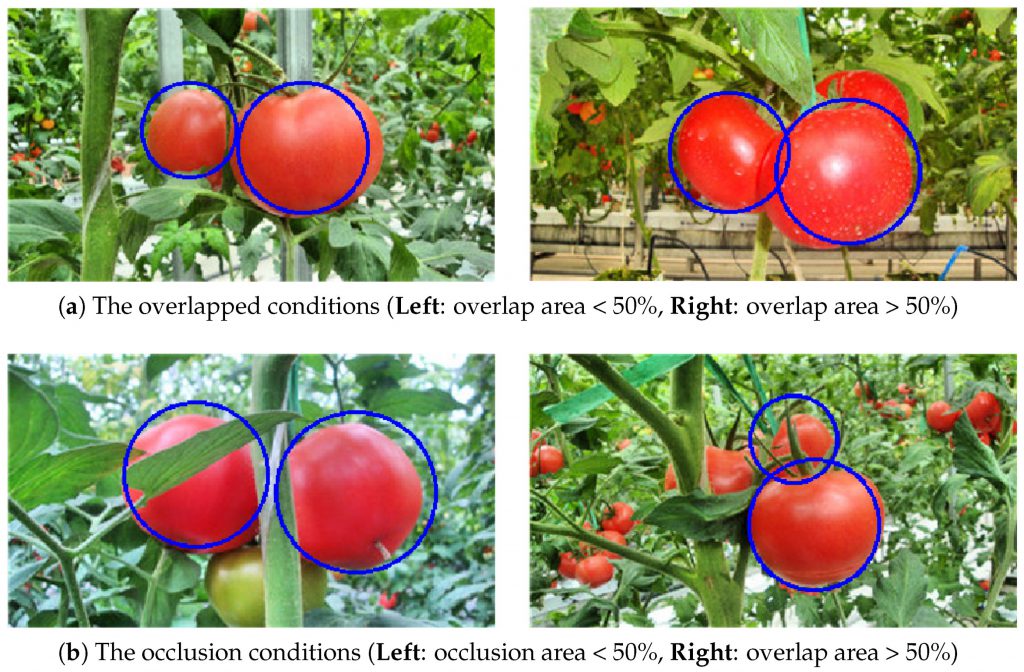
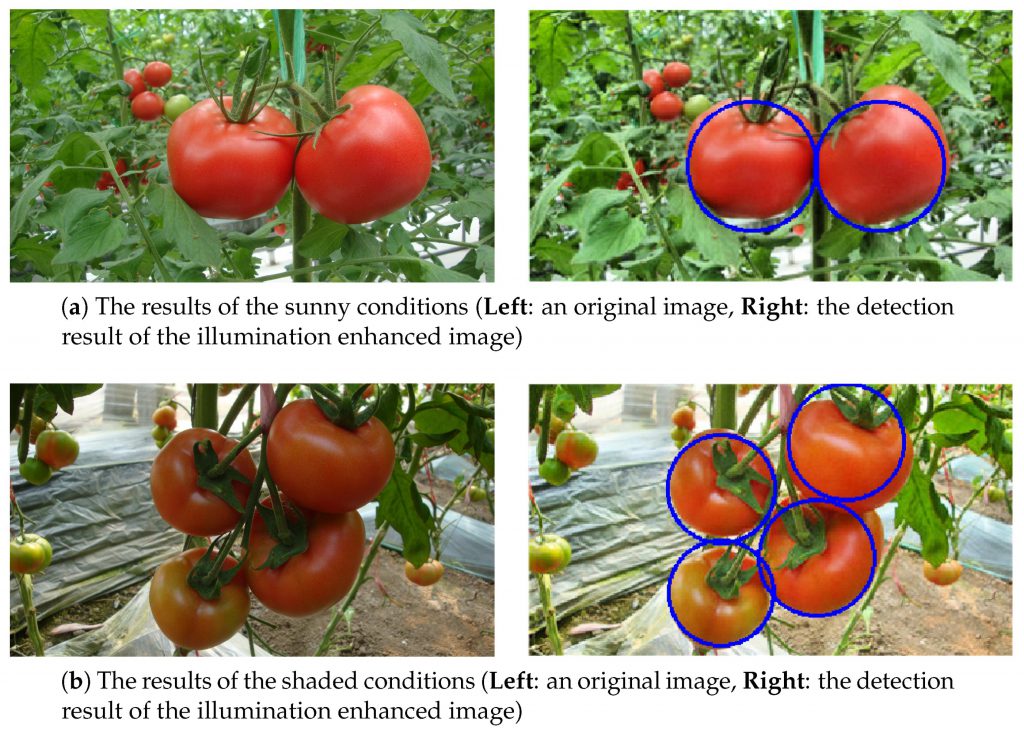
しかし、人間の目と同じように果物の検出ができるインテリジェントな視覚システムの開発は非常に困難である。研究者たちは、果物の検出にさまざまなセンサーを使用して、照明の変動と閉塞の問題を克服しようとし、果物の検出を含むコンピュータービジョンタスクにおいて機械学習を使用する試みを成功させようとしている。

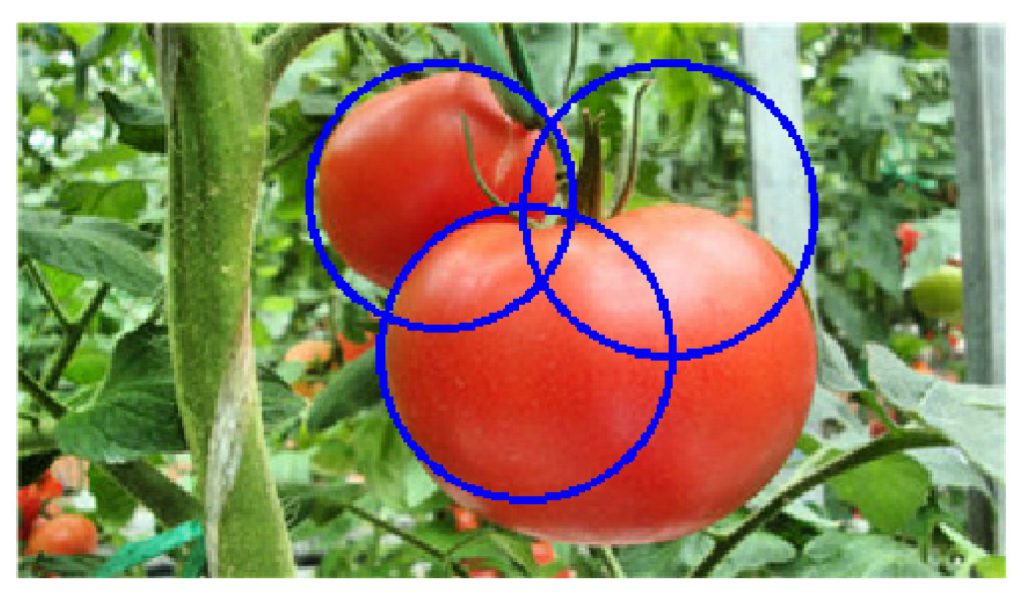
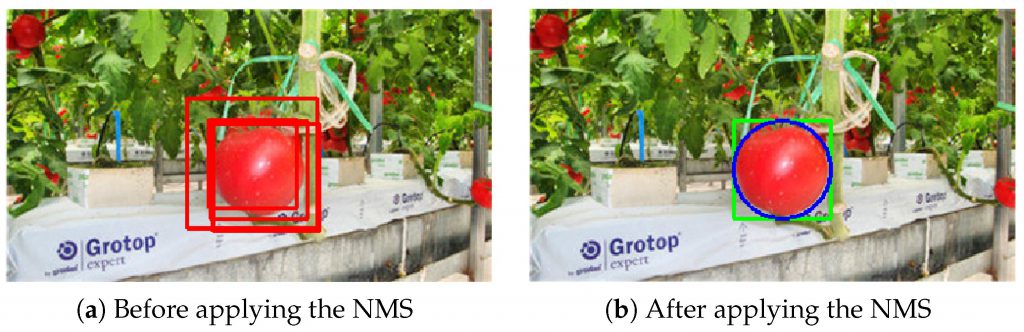
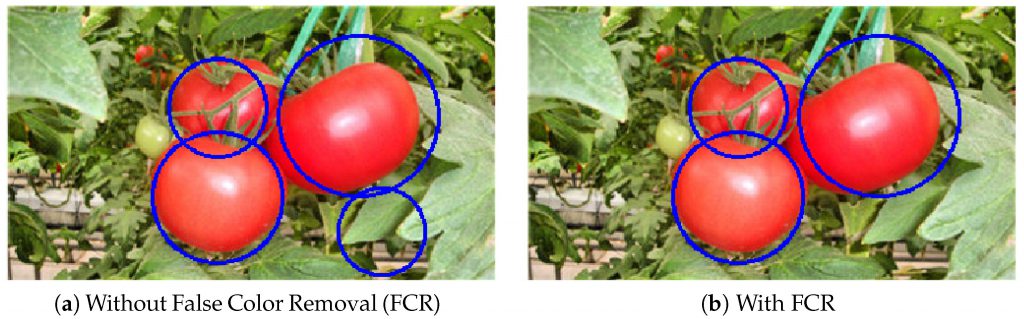
中国にある山東濰坊科技学院のGuoxu Liuら研究者は、障害物の存在下や様々な照明環境下におけるトマト画像の識別という課題に着目し、機械学習と色分析を組み合わせた手法の確立を試みた。結果、約90%の精度でトマトの検出に成功した。
高精度でトマトを検出できる視覚システム
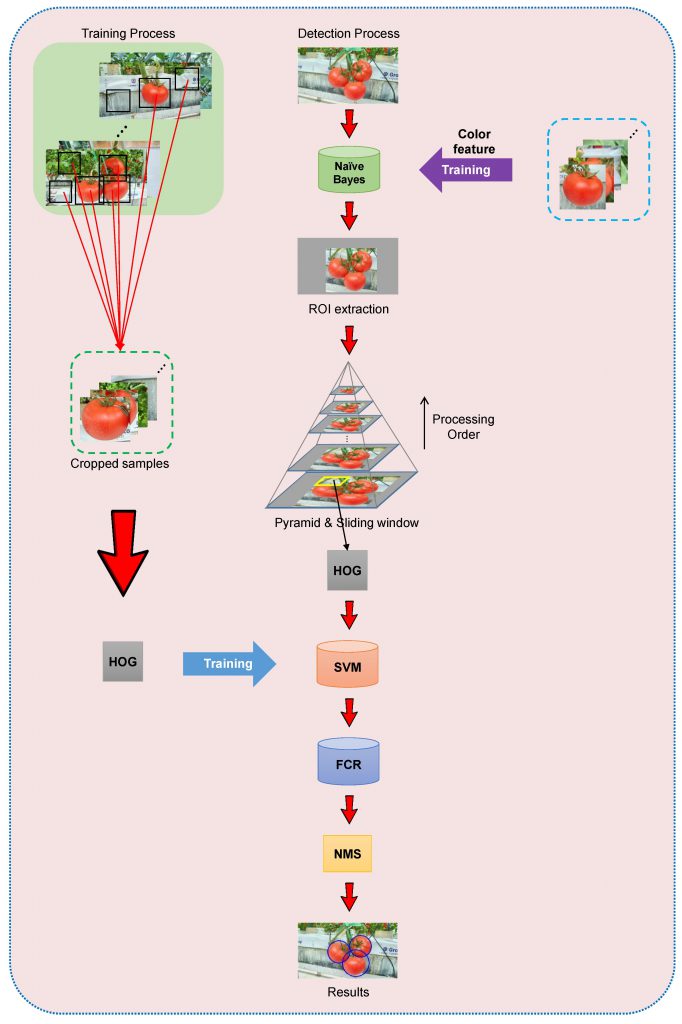

Guoxu Liuらの研究のポイントは以下の通りだ。
また記事の購読には、アカウント作成後の決済が必要です。
※ログイン/初回登録後、下記ボタンを押してください。
AIDBとは
プレミアム会員(記事の購読)について
■サポートのお願い
AIDBを便利だと思っていただけた方に、任意の金額でサポートしていただけますと幸いです。






 PAGE TOP
PAGE TOP