
■お知らせ:AIDBの感想を募集しています!
本質的にインタラクティブなロボット【AI論文】
強化学習
強化学習(RL)により、ロボットはフィードバックに基づいて動的環境で最適な行動戦略を学習することができることが発表された。 ロボットRL中の明示的な人間のフィードバックは、明示的な報酬関数を簡単に適応できるため、有利である。 しかし、人間が継続的かつ明示的にフィードバックを生成することは非常に困難で面倒なことであるため、暗黙的なアプローチの開発は非常に重要であると言える。
Su Kyoung Kimら研究者は、RLの本質的に生成された暗黙的なフィードバック(報酬)として、エラー関連電位(ErrP)、人間の脳波(EEG)のイベント関連アクティビティを使用した。
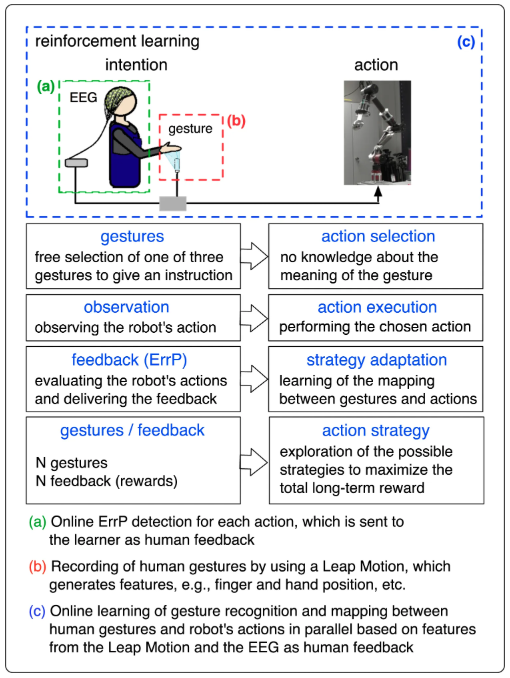
ジェスチャー認識
また記事の購読には、アカウント作成後の決済が必要です。
※ログイン/初回登録後、下記ボタンを押してください。
AIDBとは
プレミアム会員(記事の購読)について
■サポートのお願い
AIDBを便利だと思っていただけた方に、任意の金額でサポートしていただけますと幸いです。






 PAGE TOP
PAGE TOP