
■お知らせ:AIDBの感想を募集しています!
「船舶の自動運転」を助ける新技術。人手によるラベルなくともAIを学習(AI×自動運転)【論文】
課題:手作業によるラベル付きデータ作成の限界
過去10年間の海洋ロボティクスの研究により、新しいクラスの小型USV(無人水上艦)が開発されてきた。現在、USVは気象監視、海上捜索・救助、地球物理探査、環境監視などの海洋用途でますます重要な役割を果たしている。
新しいアルゴリズムの発明と計算能力の大幅な向上により、ディープラーニングベースのアルゴリズムは、視覚認識、映像処理、意味的セグメンテーションなど、多くのコンピュータビジョンタスクにおいて顕著な性能を達成してきた。しかし,最先端のディープラーニングに基づく手法でも、手作業によって作成されたラベル付き学習データセットに大きく依存してしまっている現状がある。

USV上の画像処理においても、手作業で作成されるラベル付きデータセットに依存しない、ラベル付きデータが必要ない新たな手法の開発が求められている。この度、その代案となる可能性のある手法が発表された。ここではその中国、武漢理工大学のWenqiang Zhanら研究者の発表を紹介したい。
研究者らは、ラベル付き学習データを用いない、USVの水域を認識するための新しいオンライン学習手法を提案したのだった。
テーマ:水域認識のためのオンライン半教師付き学習法の構築
まずはWenqiang Zhanらの研究におけるミッション・手法・結果をまとめた。
|
✔️ミッション ✔️解決手法 ✔️結果 |
ミッションから説明していく。
目的:データへのラベル付け作業を不要にする
頑強性に優れた水面検出と認識は、USVの自律航行に不可欠である。USVにはビジョンセンサとしてビデオカメラが搭載されており、そのカメラから得られるデータは大変豊富であるが、数百万~数十億の生の画素から有用な情報をいかにして抽出するかが課題となっている。その解決法の一つがセグメンテーションであり、各画素に水、空、岸辺、他の車両などのラベルを付与することである。
画像中の水域認識は、障害物検出や回避、経路計画など多くの用途でUSVにとって重要であり、水域のセグメンテーションを行うことで特定の領域に目標探索の制約を与えることができ、計算量を削減することが可能となる。
新しいアルゴリズムの発明と計算能力の大幅な向上により、ディープラーニングベースのアルゴリズムは、視覚認識、映像処理、意味的セグメンテーションなど、多くのコンピュータビジョンタスクにおいて顕著な性能を達成してきた。すでにUSVのナビゲーション、障害物回避、環境認識などに応用されている。
セマンティックセグメンテーションは、最も広い応用分野の一つであり、USVのシーン認識能力を向上させる。これらの手法は輪郭境界のみに焦点を当てるのではなく、画像の全ピクセルを分類する。
しかし、最先端のディープラーニングに基づく今までのこれらの手法は、手作業によるラベル付きデータセットが必要であり、またそのデータセットに大きく依存している。手作業によるデータセットの作成は大変手間であり、また学習もリアルタイムで更新することは難しい。

手法:適応的多段階セグメンテーション法による自動ラベル付けの実現
Wenqiang Zhanらは、新たな水域視覚検出手法を提案した。
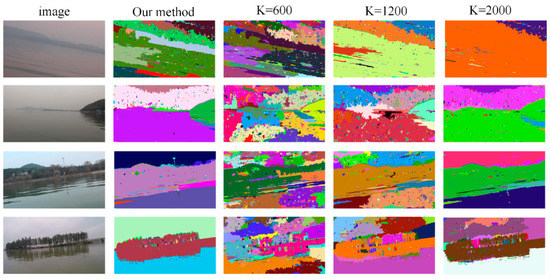
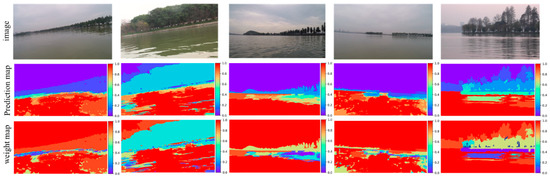
まず、入力画像の画素を異なる領域にクラスタリングし、各画素に適応的多段階セグメンテーションアルゴリズムを用いてラベルタグと信頼値を割り当てた。
次に,得られたラベルマップと信頼度マップを畳み込みニューラルネットワーク(CNN)に訓練サンプルとして与え、オンラインでネットワークを訓練する。最後に、オンラインで訓練されたCNNを用いて、入力画像を再度、より高い精度と堅牢性でセグメント化した。
他の深層学習型画像分割アルゴリズムと比較して、提案手法には2つの利点がある。第一に、コストがかかり苦痛を伴う手動での学習サンプルのラベリングの必要性がなくなること。第二に、それはネットワークがナビゲーション環境に適応すること、CNNのためのリアルタイムのオンライントレーニングが可能になることだ。
また副産物的な本研究のもう一つの貢献は、ニューロネットワークのトレーニングプロセスに関するものである。効果的なネットワーク学習法は、不完全な学習データから学習することも可能なのだ。
結果:ラベル付け作業不要の自己学習システムを構築できた
実験の結果、提案手法は従来の手法よりも優れた性能を示した。提案手法は、最新のディープラーニングベースのアルゴリズムと同様の性能を持つ一方で、手動でラベル付けしたデータを必要とせずに自己学習ができるという利点があった。
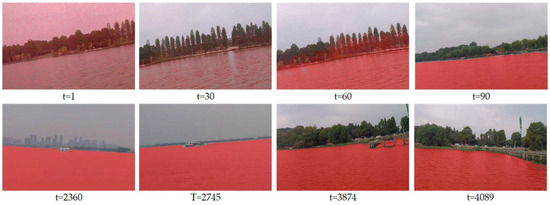
またこの手法は、インクリメンタルで連続的なオンライン学習を行うことで、変化する未知の環境にもロバストで適応することができる。
しかし,Wenqiang Zhanら曰くこの手法は、水面鏡映りのような岸辺での視覚航行が困難な状況には対応していないとのことだ。極端な例では,人間の目でも岸辺の物体と水面の鏡面反射の違いを見分けることが困難な場合がある。
今後は、マルチセンサデータの融合や再帰的ネットワーク(RNN)などの時系列的な深層学習アルゴリズムを用いて、このような難問をさらに解決していくことが考えられる。
研究紹介は以上だ。
人間との共存ハードルの低い水上では、地上よりもずっと先に自動運転が実用化されることになるだろう。
【ほかの記事もどうぞ】

▶ AIは交通安全を保証するか。標識を正確認識
▶ 人間の死角をサポートするAIで、安全な自動運転を目指す
▶ 特殊交通ルールに「順応する」自動運転車
「AI×自動運転」すべてのバックナンバーはこちら
この記事で取り扱った論文:Wenqiang Zhan ,OrcID,Changshi Xiao ,Yuanqiao Wen ,Chunhui Zhou ,Haiwen Yuan ,Supu Xiu ,Yimeng Zhang 1OrcID,Xiong Zou 1,Xin Liu , andQiliang Li,”Autonomous Visual Perception for Unmanned Surface Vehicle Navigation in an Unknown Environment”,Sensors2019, 19(10), 2216 - DOI
■サポートのお願い
AIDBを便利だと思っていただけた方に、任意の金額でサポートしていただけますと幸いです。






 PAGE TOP
PAGE TOP