
■お知らせ:AIDBの感想を募集しています!
ロボットの嗅覚開発!【AI論文】
ロボットへの嗅覚実装の課題感
嗅覚は、モバイルロボット工学でまだ十分に活用されていない分野の貴重な情報を含んでいる。
臭気情報は、実際は視覚など他の感覚にも貢献し、人的環境でのタスク計画やその実行など、ハイレベルのロボット制御に役立つ。
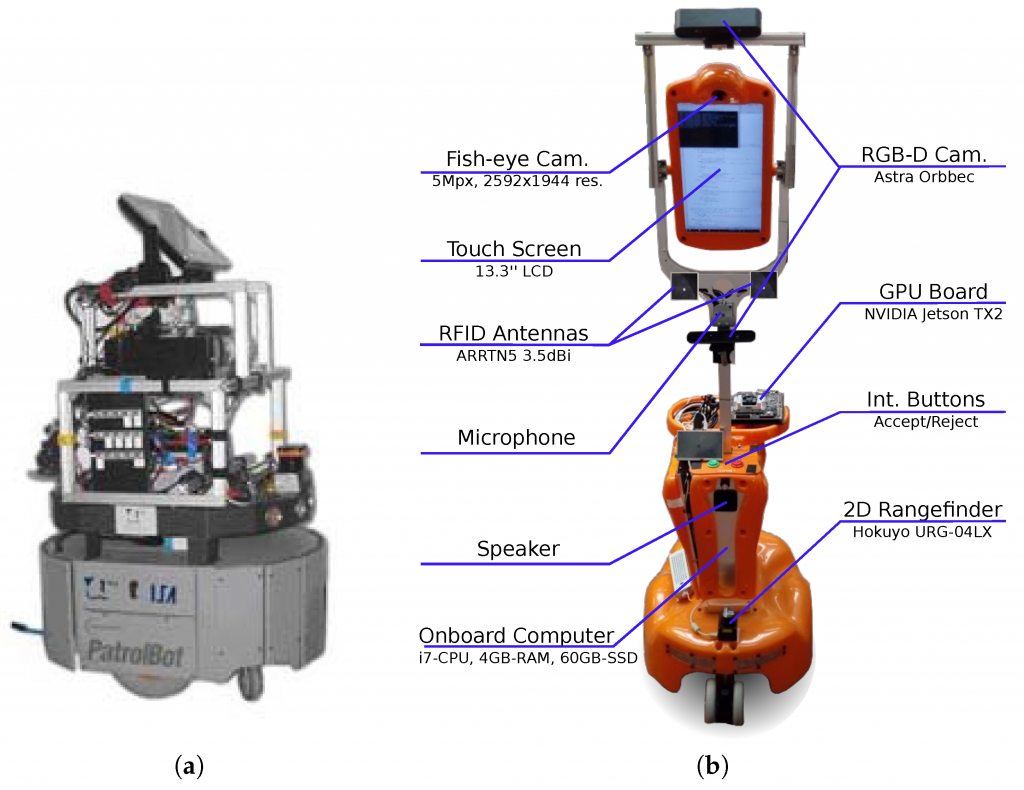
研究者らは、5年に渡るプロジェクトIROの結果として、嗅覚と視覚を組み合わせたロボットアプリケーションの開発と経験についてまとめた。
嗅覚によるロボットの感覚と自律能力の改善がテーマである。

モジュール式でコンパクトな設計により、移動ロボットに簡単に取り付けて、アプリケーションの要件に適合させることができる。
臭気知覚の有用性
また記事の購読には、アカウント作成後の決済が必要です。
※ログイン/初回登録後、下記ボタンを押してください。
AIDBとは
プレミアム会員(記事の購読)について
■サポートのお願い
AIDBを便利だと思っていただけた方に、任意の金額でサポートしていただけますと幸いです。






 PAGE TOP
PAGE TOP