
■お知らせ:AIDBの感想を募集しています!
2足歩行ロボットはなぜ難しい?【AI論文】
ロボットの制御は、それが胸踊るものであればあるほど実現が難しい。
以下は、2足歩行ロボットの制御についての最新論文である。

A. Rai, R. Antonova, F. Meier, and C. G. Atkeson, “Using Simulation to Improve Sample-Efficiency of Bayesian Optimization for Bipedal Robots”. Journal of Machine Learning Research, 20, 1-24 (2019). より
シミュレーションとベイジ最適化
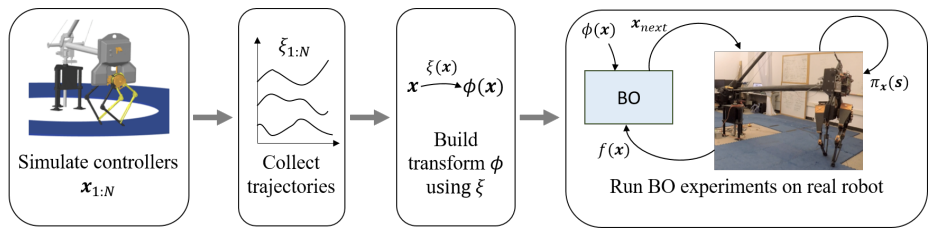
制御を学習することで、新しいロボットタスクのコントローラーを取得し、自律エージェントの道を開くことができる。このようなコントローラーは、専門家が設計したポリシーにすることができ、通常は各タスクシナリオのパラメーターの調整が必要だ。これに関連して、ベイジ最適化(BO)は、コントローラーを自動調整するための有望な方法として浮上している。しかし、ハードウェアの高次元ポリシーでは、サンプルの効率が依然として問題になる可能性がある。
そのため、シミュレーションを利用して、元のパラメーター空間をドメイン情報空間にマッピングする構造化された特徴を変換する学習に対する有効な方法を開発する。 BOの実行中、コントローラー間の類似性が変換された空間で計算されるようになった。 ATRIASロボットハードウェアとシミュレーションの実験により、複数のロボット用のコントローラーがサンプルを効率的に学習することに成功していることがわかる。
ベイジ最適化とロボット
また記事の購読には、アカウント作成後の決済が必要です。
※ログイン/初回登録後、下記ボタンを押してください。
AIDBとは
プレミアム会員(記事の購読)について
■サポートのお願い
AIDBを便利だと思っていただけた方に、任意の金額でサポートしていただけますと幸いです。






 PAGE TOP
PAGE TOP